Tech4POD - Equivalent Text Description
Robot-Assisted Control Model
Brief Description:
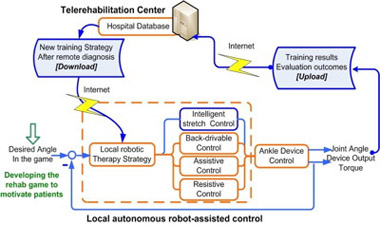
Flowchart shows a robot-assisted control model via telerehabilitation.
Essential Description:
This diagram illustrates the logic and flow of information of the home based Telerehabilitation Center using a Local Autonomous Robot-assisted Control device to a hospital database. The diagram illustrates the circular flow of information from the home to the hospital database and back again to the robot-assisted home device.
Detailed Description:
This flowchart shows the progression and integration of rehab games to therapeutic use to outcomes collected and utilized for additional training strategies developed from a hospital database and feeding rehab games. Initially, “Developing the rehab game to motivate patients” influences the “Desired Angle In the game” and “Local autonomous robot-assisted control” to lead to “Local robotic Therapy Strategy”. This feeds four results, “Intelligent stretch Control”, Back-drivable Control”, “Assistive Control”, and “Resistive Control”. These merge to feed the “Ankle Device Control” which contributes to the “Local autonomous robot-assisted control” and “Joint Angle Device Output Torque”. This feeds the “Training results Evaluation outcomes [Upload]”, which uses the internet to upload to a “Hospital Database”. The database leads to “New training Strategy After remote diagnosis [Download]” which requires the Internet and feeds the already mentioned “Local robotic Therapy Strategy”, thus completing the iterative loop.